Multi-agent AI Nanorobots against Tumors
Posted: February 22nd, 2016 | Author: Domingo | Filed under: Artificial Intelligence | Tags: AI, Artficial Intelligence, Multi-agent Systems, Nanocolony, Nanotechnology | Comments Off on Multi-agent AI Nanorobots against TumorsCancer is probably one of the biggest challenges medicine is facing nowadays. For the last decades the use of radiotherapy and chemotherapy has been the optimal tool to eradicate the malign tumors our bodies wrongly develop. Nonetheless, with the amazing evolution of nanotechnology and Artificial Intelligence, new lines of research have been launched regarding the cancer treatment and cure.
In this post I explain the implementation I performed of the IA researchers M. A. Lewis and G. A. Bekey’s scientific article –The Behavorial Self-Organization of Nanorobots Using Local Rules. Institute of Robotics and Intelligent Systems. University of Southern California. July 7th, 1992-, related to the use of multi-agent AI nanorobots to cope with tumor removing.
Multi-Agent systems involve a number of heterogeneous resources/units, working collaboratively towards solving a common problem, despite the fact that each individual might have partial information about the problem and limited capabilities. In parallel, nanotechnology focuses on manipulating matter with dimensions similar to the ones of biological molecules. Current advances in the domain have been receiving much attention from both the academia and the industry, largely due to the fact that nanostructures exhibit unique properties and characteristics. A plethora of applications in a wide range of fields are currently available; however, what appears to be amongst the most promising endeavors is the development of nanotechnological constructs targeted for medical use. Nanoparticles suitable for medicine purposes, such as dendrimers, nanocrystals, polymeric micelles, lipid nanoparticles and liposomes are already being manufactured. Those nanostructures exploit their inherent biological characteristics, and are based on molecular and chemical interactions to achieve the specified target.
Regarding the simulation I developed:
1.- The target of the colony of nanorobots -injected in a human body- was the removal of malignant brain tissue. The tumor was assumed to be relatively compact.
2.- The nanorobots communicated to each other and, in addition to this communication mechanism, each of them had the capacity to unmask the tumor: they were assumed to have a “tumor” detector which could differentiate between cells to be attacked and healthy cells. They should wander randomly until encounter the tumor and then act. Eventually a nanorobot could only detect a tumor if it landed directly on a square containing a tumor element. The grid on which the nanorobots moved was considered a closed world.
3.- The simulation was implemented using NetLogo -Uri Wilensky, 1999: a programmable modeling environment for simulating natural and social phenomena.
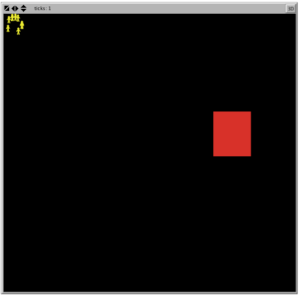
The initial scenario encompassed a group of x nanorobots, injected inside a human body, with a certain value regarding their energy threshold; i.e., the amount of energy a nanorobot enjoyed before committing to its tasks of attacking and destroying a tumor. When a nanorobot’s energy threshold equaled to or was less than a certain amount, it biodegraded itself and disappeared.
As it can be noticed in the screenshot below attached, besides the nanorobots in the grid there was a red square which symbolized the tumor:
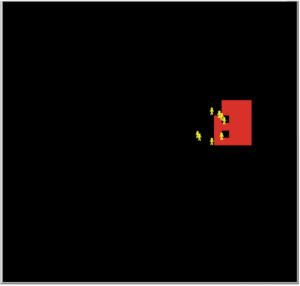
The process was the following: upon launching the model simulation, the nanorobots began wandering around looking for the tumor. As soon as one of them discovered the tumor, it communicated the news to the rest, the exact location, and all of them gathered in front of the tumor:
And they started attacking and destroying it:
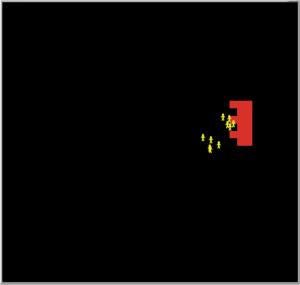
Every single time one of the nanorobots managed to destroy a piece of the tumor, all of them gathered again and they began their attack from their initial point since they considered once the tumor membrane was broken at that point, that was the weakest and easiest gap to get in and to keep on their labor of destroying the cancer:
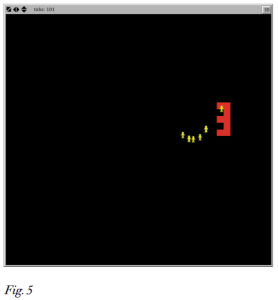
Unlike Lewis and Bekey’s model, in the simulation I carried out, at the end of their task, nanorobots did exhibit an artificial intelligent behavior; i.e., those nanorobots, which had been more exposed to the tumor because they had been more active fighting and destroying it, biodegraded themselves as not only their exposition to a malign tissue had been higher than the rest, but also their level of energy after the effort had diminished more and, in the event that a new tumor might appear, they would not have been adequate individuals to perform the required fight.
In the screenshot below six nanorobots remained in the area, just monitoring the likely appearance and growth of new tumors. They could linger in the human body since their composition and structure would be fully compatible with the human nature:
With respect to the future work in this line of research, from my point of view the most important challenge regarding the use of nanorobots to cure cancer is: how could nanorobots fight and succeed when there is metastasis in a patient with cancer? In the simulation I developed the tumor was perfectly defined and static but many times this is not the case.
As a conclusion, a last thought with respect to this kind of multi-agent AI simulation exercise: due to the very nature of medical research, which requires lengthy periods of time and adherence to strict protocols before any new developments are encompassed, computer simulations can offer a great advantage towards accelerating both the basic and applied research processes to the cure of serious diseases or biological anomalies such as cancer.